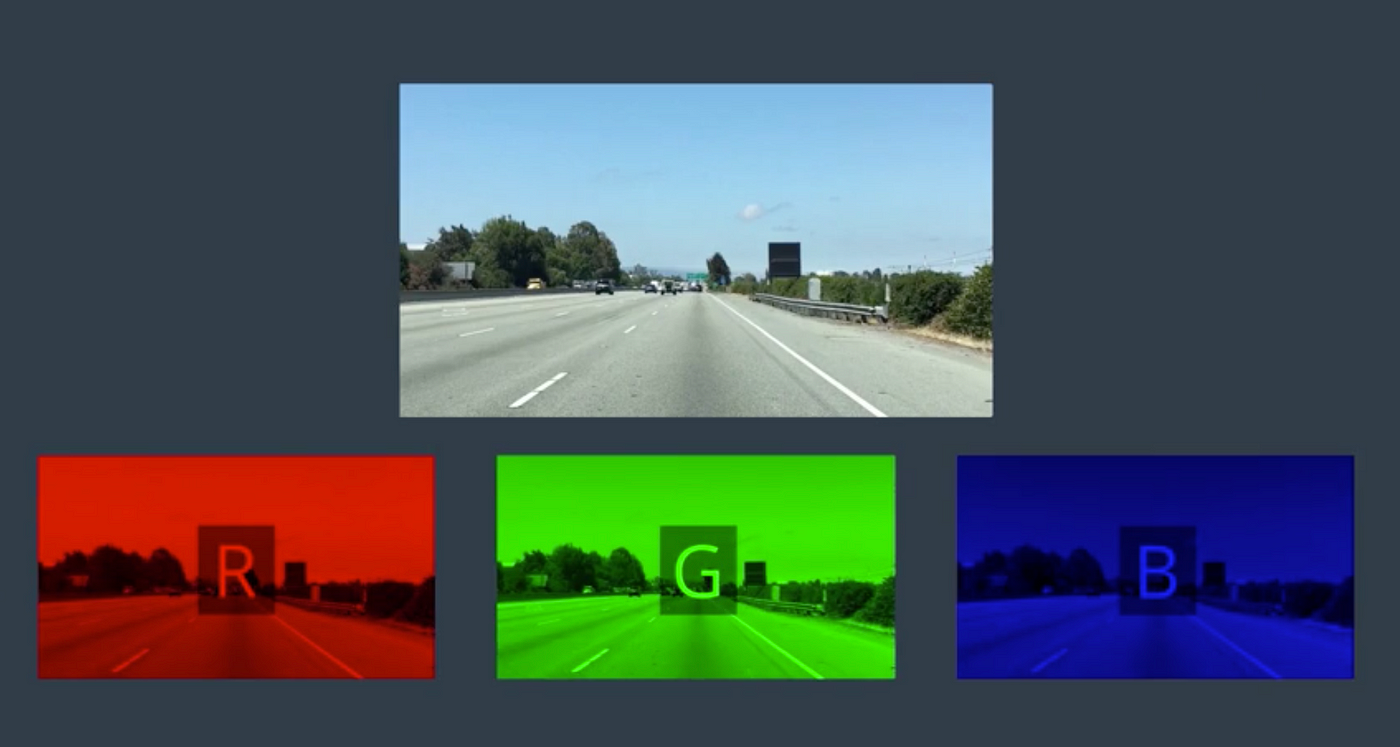
Lane Detection using Edge Detection and Hough Transform: Self Driving Cars series

Computer Vision: Lane Finding Through Image Processing, by Archit Rastogi, The Startup

ORNL Computational Scientist Deeksha Rastogi Models Climate Extremes with HPC

Illustration of the U-net Architecture for semantic segmentation

a) Location of the study area in Tianhe District of Guangzhou City;

Lane Width National Association Of City Transportation, 56% OFF

How Rajeev Rastogi's machine learning team in India develops innovations for customers worldwide - Science
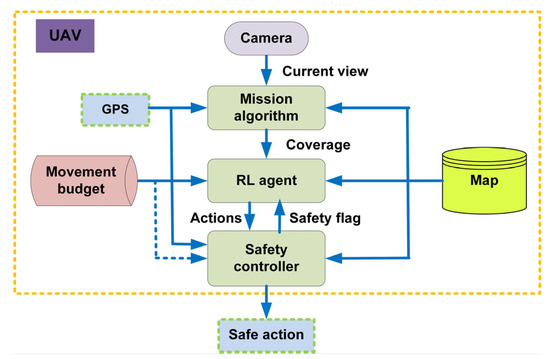
Drones, Free Full-Text
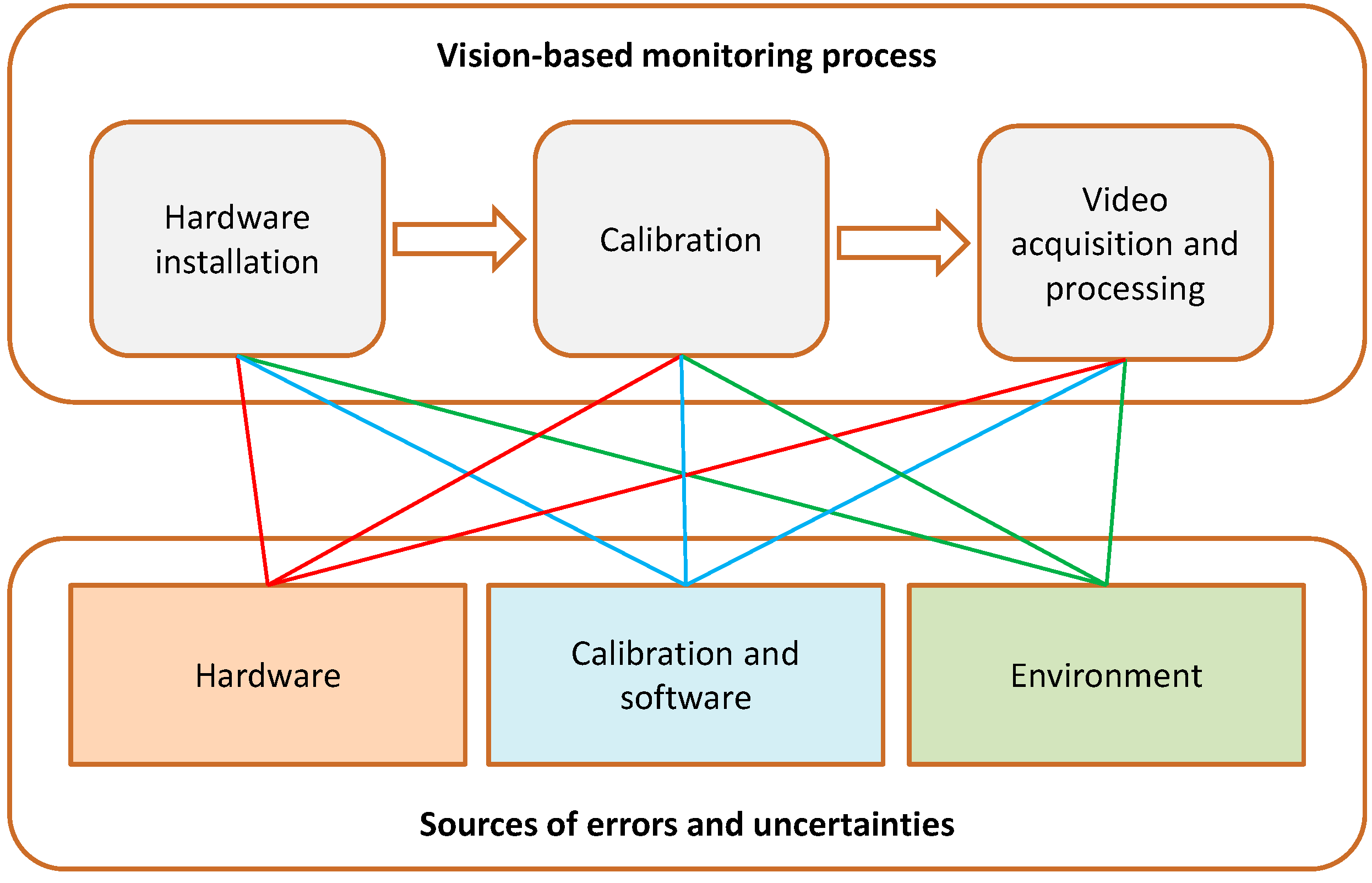
Infrastructures, Free Full-Text

Accurate prediction of functional effect of single amino acid variants with deep learning - Computational and Structural Biotechnology Journal
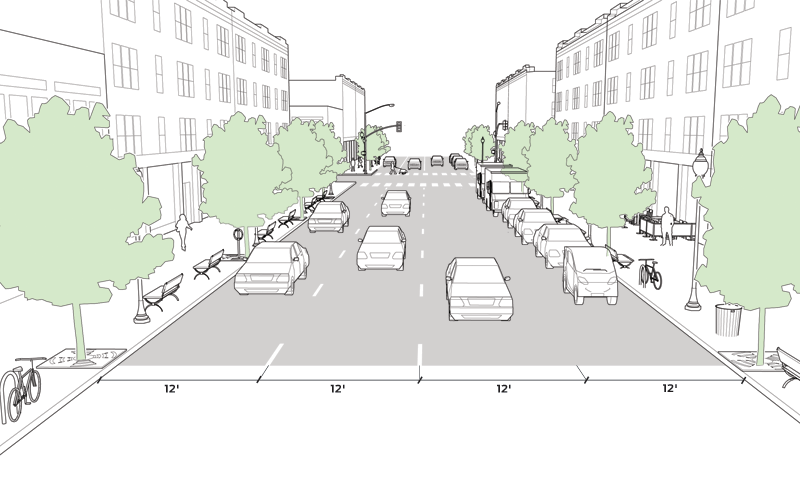
Lane Width National Association Of City Transportation, 56% OFF
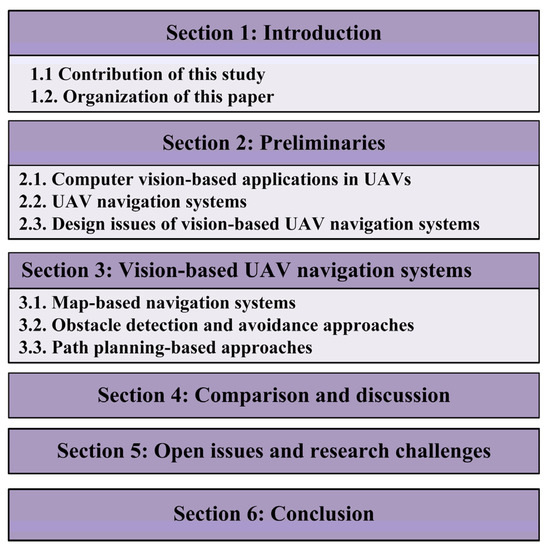
Drones, Free Full-Text
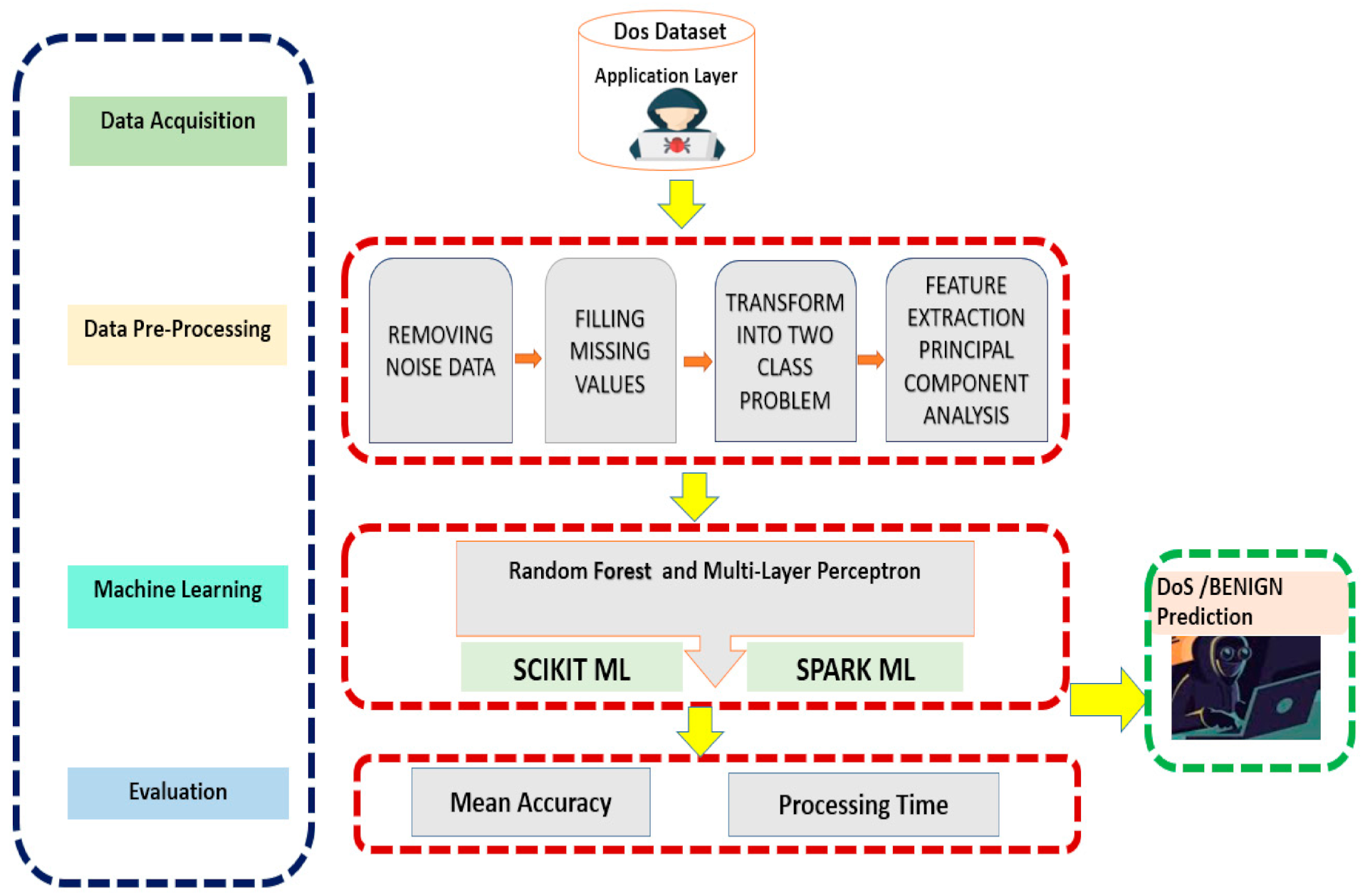
Sustainability, Free Full-Text

Tips to Optimize Communication Between Computer Vision Models